Environments
General Concept
AirHockeyChallengeWrapper is a wrapper of the base_env and will process the
necessary information for the challenge evaluation.
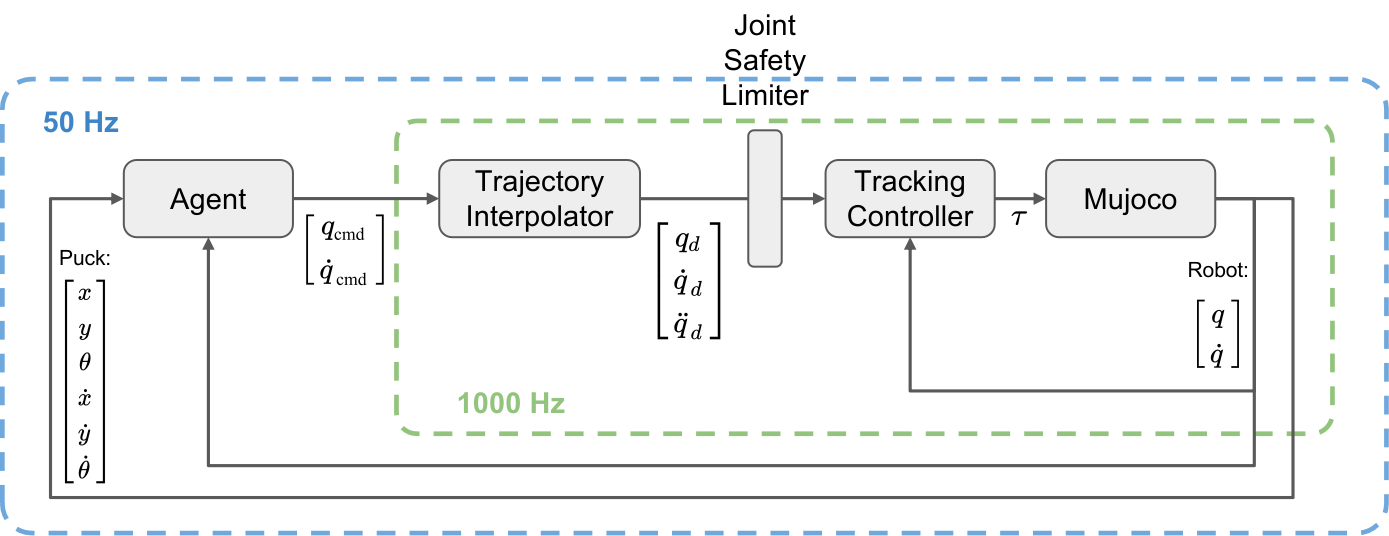
We try to make the simulated environment close to the real-world setup. The robot is
controlled by a TrackingController, a Feedforward-PD Controller, which sends the
torque command \(\tau_{cmd}\) to the robot
A TrajectoryInterpolator, cubic polynomial, is used to interpolate the trajectory
points between two consecutive commands. To avoid the interpolator generating irrational
set points, i.e., the command exceeds the position or velocity limits, we also modify the
set point \(q_d, \dot{q}_d\) by a JointSafetyLimiter, following
Joint Safety Limits.
Specification of the Environment
Here we list all important specifications about the environment:
Simulation Frequency |
1000 Hz |
Control Frequency |
50Hz |
Observation |
Puck’s X-Y Position, Yaw Angle: \([x, y, \theta]\) |
Puck’s Velocity: \([\dot{x}, \dot{y}, \dot{\theta}]\) |
|
Joint Position / Velocity: \([q, \dot{q}]\) |
|
Opponent’s Mallet Position (if applicable): \([x_o, y_o]\) |
|
Control Command |
Desired Joint Position / Velocity |
Available Environments |
Qualifying: |
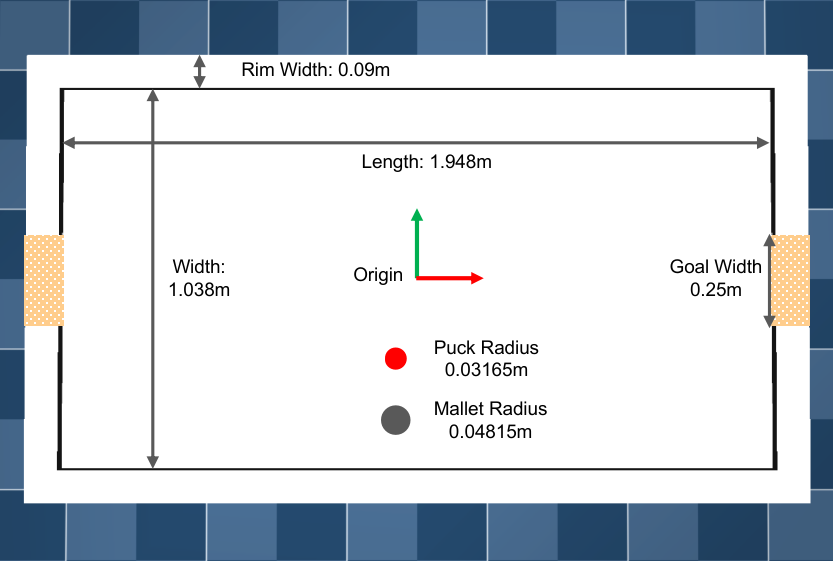
Air Hockey Table
The dimensions of the Table, Puck and Mallet are specified in the following figure.
KUKA iiwa14 LBR Robot
For the KUKA robot, we add a universal joint on the end-effector to increase the robot’s flexibility. The universal joint is a passive joint that will adapt the joint position based on contacts. In the simulation, we use a plugin to compute the joint’s angle to keep the mallet vertical. The position of the universal joint is not observed.
We define the End-Effector as the tip of the extension rod before the universal joint. The end-effector’s position can be fully determined by the robot’s joint position and forward kinematics. The base position of the robot is depicted in the Figure.

Environment Construction
You can construct the environment by
from air_hockey_challenge.framework import AirHockeyChallengeWrapper
# Available Environments [hit, defend, prepare, tournament]
env = AirHockeyChallengeWrapper("hit")
print(env.env_info)
env_info
The environment’s information is specified in a nested dictionary env_info. env_info
is passed to the AgentBase constructor. Here we provide a quick reference table for
convenience.
env_info = {
"env_name": str, # Name of the environment
"n_agents": int, # Number of Agents, [1, 2]
"dt": 0.02, # Delta time between two control signal
"puck_pos_ids": list(int), # Observation's indices the puck's position
"puck_vel_ids": list(int), # Observation's indices the puck's velocity
"joint_pos_ids": list(int), # Observation's indices the robot joint position
"joint_vel_ids": list(int), # Observation's indices the robot joint velocity
"opponent_ee_ids": list(int), # Observation's indices the opponent's ee position (if applicable)
'rl_info': mushroom_rl.MDPInfo # Object contains information for RL algorithms in MushroomRL
"table": {
"length": 1.948,
"width": 1.038,
"goal_width": 0.25,
},
"puck": {
"radius": 0.03165,
},
"mallet": {
"radius": 0.04815,
},
# Specifications of the Robot
"robot": {
"n_joints": 7, # Number of robot's joints
"base_frame": list(ndarray(4, 4)), # The transformation matrix of the base frames
"ee_desired_height": 0.1645, # The height of the end-effector w.r.t base frame
"joint_pos_limit": ndarray(2, N), # The lower and upper limits of joint position
"joint_vel_limit": ndarray(2, N), # The lower and upper limits of joint velocity
"joint_acc_limit": ndarray(2, N), # The lower and upper limits of joint acceleration
"control_frequency": 50,
"robot_model": mujoco.mjModel, # The mjModel object of the robot only model. For kinematics computation
"robot_data": mujoco.mjData, # The mjData data of the robot only model. For kinematics computation
}
'constraints': ConstraintList # An object for the constraints computation
}